图论——存储图
图论算法是一个很大的专题,有很多的知识点。但是,在学习图论的各个知识点之前,首先需要对于图的存储有十分清楚的理解,了解各种方式的优劣。
一般而言,图的存储方式有 4 种:
- 直接存边
- 邻接矩阵
- 邻接表
- 链式前向星
直接存边
在某些算法中(如用于解决最小生成树问题的 Kruskal 算法),我们可以直接将边存在一个结构体中。这种方式的优势是编码快速,空间效率高,并且便于依据边权进行排序。
结构体的定义如下:
struct Edge {
int u; // 起点
int v; // 终点
int w; // 边权
};| u | v | w |
|---|---|---|
| 0 | 1 | 3 |
| 1 | 2 | 5 |
| 2 | 1 | 4 |
| 2 | 6 | 8 |
| 4 | 5 | 9 |
建立上表中图并排序的代码如下:
vector<Edge> edges;
edges.push_back({0, 1, 3});
edges.push_back({1, 2, 5});
edges.push_back({2, 1, 4});
edges.push_back({2, 6, 8});
edges.push_back({4, 5, 9});
sort(edges.begin(), edges.end(), [&](Edge a, Edge b) {
return a.w > b.w;
});
for (Edge &edge : edges) {
printf("%d %d %d\n", edge.u, edge.v, edge.w);
}
// 4 5 9
// 2 6 8
// 1 2 5
// 2 1 4
// 0 1 3邻接矩阵
邻接矩阵是 3 种存储方式中最为简单的方式。本方式使用一个二维数组 g[N][N] 进行图的存储。
其中,g[i][j] = w 代表点 i 至点 j 存在一条边权为 w 的有向边。当然,如果仅仅想表示 i 和 j 之间有边,可以将 w 定为任何值。一般而言,如果使用邻接矩阵表示边权时,通常使得该邻接矩阵所有元素的初始值为 INF(一个十分大的数字);使用邻接矩阵表示有边时,可以直接将该邻接矩阵定义为 二维布尔数组。
使用邻接矩阵的空间复杂度为 $O(n^2)$。
注意:无向图是特殊的有向图。节点 i 至节点 j 有一条无向边代表节点 i 和节点 j 之间,以及节点 j 和节点 i 之间分别有条有向边。
例如,一个 1000 个节点的图,点的编号从 1 开始,可以为该邻接矩阵定义为 g[1001][1001]。
const int INF = 0x3f3f3f3f; // 使用 INF 代表一个十分大的数字
int g[1001][1001];
void add_direct(int u, int v, int w) {
g[u][v] = min(g[u][v], w); // 如果有重边,则将其赋值为较小的值
}
void add_undirect(int u, int v, int w) {
g[u][v] = g[v][u] = min(g[u][v], w);
}
int main() {
memset(g, 0x3f, sizeof(g)); // 使用 memset 将 g 数组所有元素赋为极大值
add_direct(100, 200, 30); // 添加一条 100 -> 200 的有向边,边权为 30
add_undirect(500, 600, 80); // 添加一条 500 <-> 600 的无向边,边权为 80
}邻接矩阵优点:
- 编程简单;
- 查找快速,复杂度仅为 $O(1)$;
- 十分适合稠密图;
邻接矩阵缺点:
- 不适合稀疏图。当使用邻接矩阵表示稀疏图时,会有大片的空间浪费;
- 不能够存储重边。
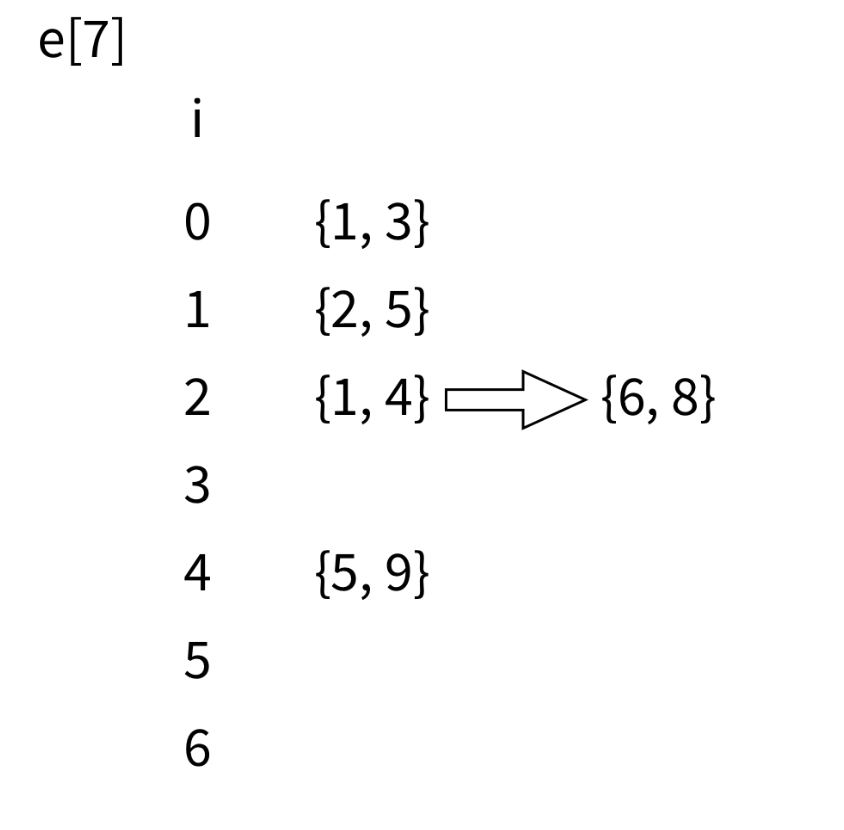
邻接表
为了解决邻接矩阵浪费空间的问题,可以使用邻接表。邻接表是一个类似于链表的结构。邻接表的空间复杂度为 $O(n+m)$。
例如,一个节点个数为 7 的有向图,可以有如下边:
| u | v | w |
|---|---|---|
| 0 | 1 | 3 |
| 1 | 2 | 5 |
| 2 | 1 | 4 |
| 2 | 6 | 8 |
| 4 | 5 | 9 |
其实现后效果可以如下图所示:
使用 STL 中的 vector 容器实现代码如下:
const int N = 7;
struct Edge {
int v, w;
};
vector<Edge> e[N]; // 使用 vector 数组下标代表 u
void add_edge(int u, int v, int w) {
e[u].push_back({v, w});
}
int find(int u, int v) {
for(int i = 0; i < e[u].size(); i++) { // 遍历所有由 u 开始的边
if (e[u][i].v == v) {
return e[u][i].w;
}
}
return 0x3f3f3f3f; // 找不到,则输出个极大值
}
int main() {
add_edge(0, 1, 3);
add_edge(1, 2, 5);
add_edge(2, 1, 4);
add_edge(2, 6, 8);
add_edge(4, 5, 9);
int w1 = find(1, 4); // 找不到边,返回 0x3f3f3f3f
int w2 = find(0, 1); // 找到该边,返回 3
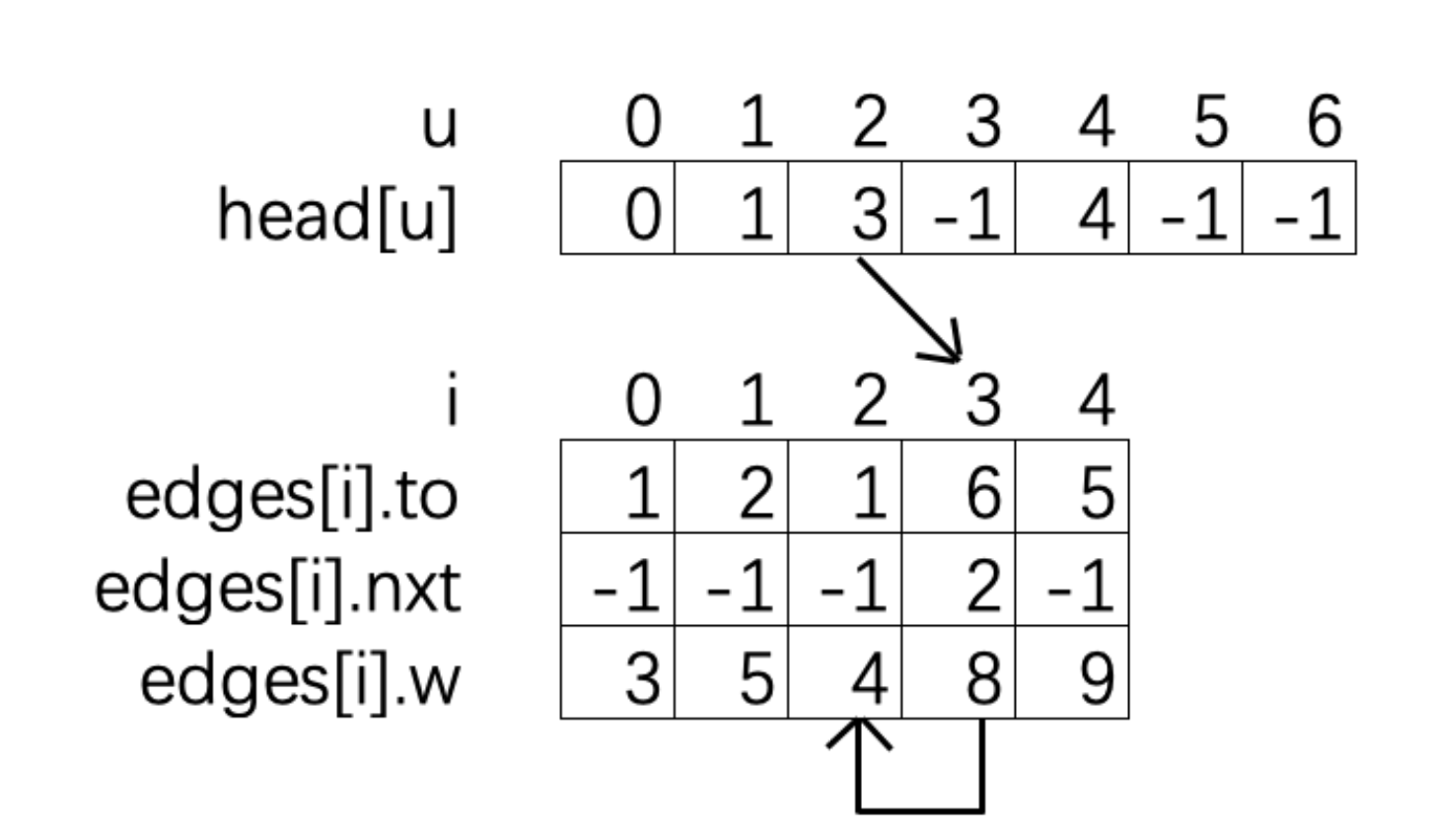
}链式前向星
链式前向星是空间效率最高的存储方式。其使用静态数组来存储边,来模拟邻接表。
链式前向星使用 head[N] 来确定头节点,使用 edges[M] 来表示边。边的类型是个结构体,其中包括 to(指向的边)、nxt(下一条边)、w(边权)。
依然使用上面邻接表的例子。使用链式前向星,其空间存储如下图所示:
const int N = 1e5 + 10; // 最多有 100,000 条边
const int M = 1e6 + 10; // 最多有 1,000,000 条边
struct {
int to, nxt, w;
} edges[M];
int head[N], cnt;
void add(int u, int v, int w) {
edges[cnt].to = v; // 指向 v 点
edges[cnt].w = w; // 边权为 w
edges[cnt].nxt = head[u]; // 将 u 的邻接点向后顺延
head[u] = cnt++;
}
int find(int u, int v) {
for(int i = head[u]; ~i; i = edges[i].nxt) { // ~i 相当于 i != -1
if (edges[i].to == v) {
return edges[i].w;
}
}
return 0x3f3f3f3f;
}
int main() {
memset(head, -1, sizeof(head)); // 初始化
add(0, 1, 3);
add(1, 2, 5);
add(2, 1, 4);
add(2, 6, 8);
add(4, 5, 9);
int w1 = find(1, 4); // 找不到边,返回 0x3f3f3f3f
int w2 = find(0, 1); // 找到该边,返回 3
}